MJCF インポート¶
学習目標¶
このチュートリアルを修了すると、以下の内容を習得できます:
- MJCF(MuJoCo)モデルファイルを Isaac Sim にインポートする方法
- GUI および Python スクリプトによるインポート方法
- インポート後のロボットのアーティキュレーション設定
はじめに¶
前提条件¶
- Isaac Sim のクイックチュートリアルを完了していること
所要時間¶
約 5〜10 分
概要¶
このチュートリアルでは、MJCF(MuJoCo XML)形式のモデルファイルを Isaac Sim にインポートし、USD 形式に変換する方法を学びます。GUI からの対話的なインポートと Python スクリプトによるプログラム的なインポートの2つの方法を解説します。
GUI でのインポート¶
-
Window > Extensions から MJCF Importer エクステンションを有効化します。
-
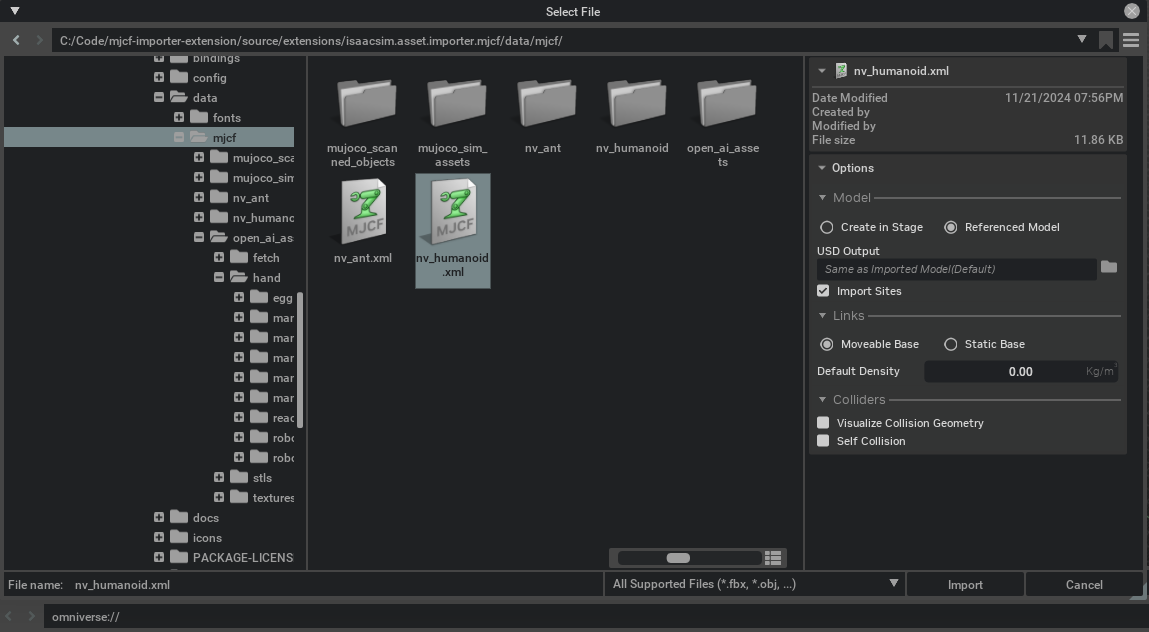
File > Import でファイル選択ダイアログを開きます。
-
エクステンションのアセットフォルダ(
/data/mjcf)からnv_humanoid.xmlなどのファイルを選択します。 -
インポート設定を構成し、Import をクリックします。
Python スクリプトによるインポート¶
Script Editor(Window > Script Editor)を使ったプログラム的なインポートも可能です:
MJCFCreateImportConfigコマンドでインポート設定を作成fix_base()やmake_default_prim()などのオプションを設定MJCFCreateAssetコマンドでアセットを作成- 物理シーンの初期化(重力設定)
- ライティングの追加
主な設定オプション¶
| オプション | 説明 |
|---|---|
fix_base |
ロボットのベースを固定するかどうか |
make_default_prim |
デフォルトプリムとして設定するかどうか |
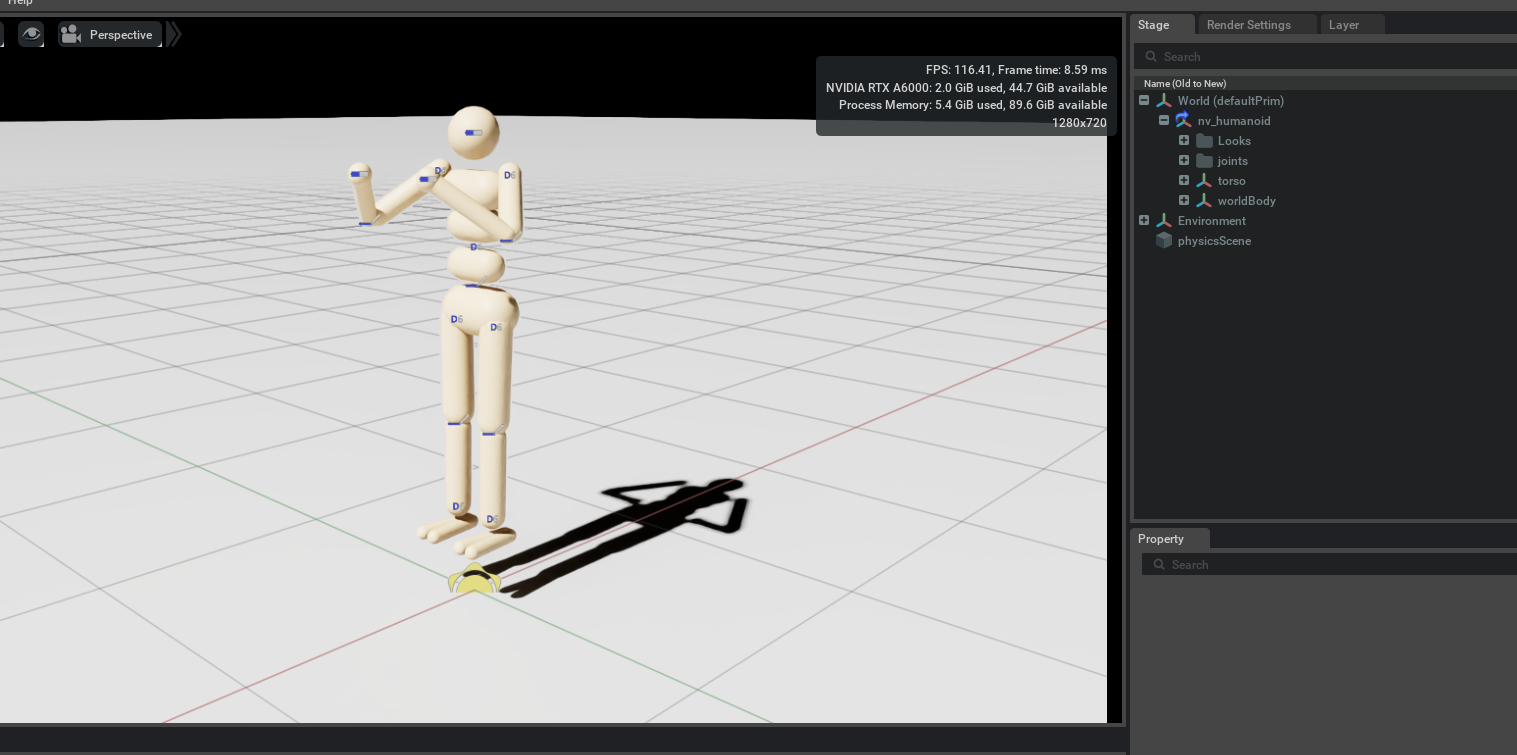
インポート後の設定¶
- インポートされたロボットはシミュレーション内のアーティキュレーションとして変換されます
- インポート後にセンサー、マテリアル、ジョイント設定を変更可能
- アーティキュレーションの安定性はスタビリティガイドを参照して調整できます
まとめ¶
このチュートリアルでは以下のトピックを扱いました:
- GUI による MJCF ファイルのインポート
- Python スクリプトによるプログラム的インポート
- インポート後のアーティキュレーション設定
次のステップ¶
- チュートリアル 4: ShapeNet インポーター - ShapeNet データベースからの3Dモデルインポート方法を学びます。