URDF インポート¶
学習目標¶
このチュートリアルを修了すると、以下の内容を習得できます:
- URDF ファイルを Isaac Sim にインポートする方法
- インポート設定(ベースタイプ、密度、コリジョンプロパティ)の構成
- コリジョンメッシュの可視化と確認
- Python スクリプトによるプログラム的なインポート
- ROS 2 ノードからの URDF インポート
はじめに¶
前提条件¶
- Isaac Sim のクイックチュートリアルを完了していること
- URDF Importer Extension の基本を理解していること
所要時間¶
約 10〜15 分
概要¶
このチュートリアルでは、URDF(Unified Robot Description Format)ファイルを Isaac Sim にインポートし、USD 形式に変換する方法を学びます。GUI での直接インポート、Python スクリプトによるインポート、ROS 2 ノードからのインポートの3つの方法を解説します。
GUI での直接インポート¶
-
isaacsim.asset.importer.urdfエクステンションを有効化します。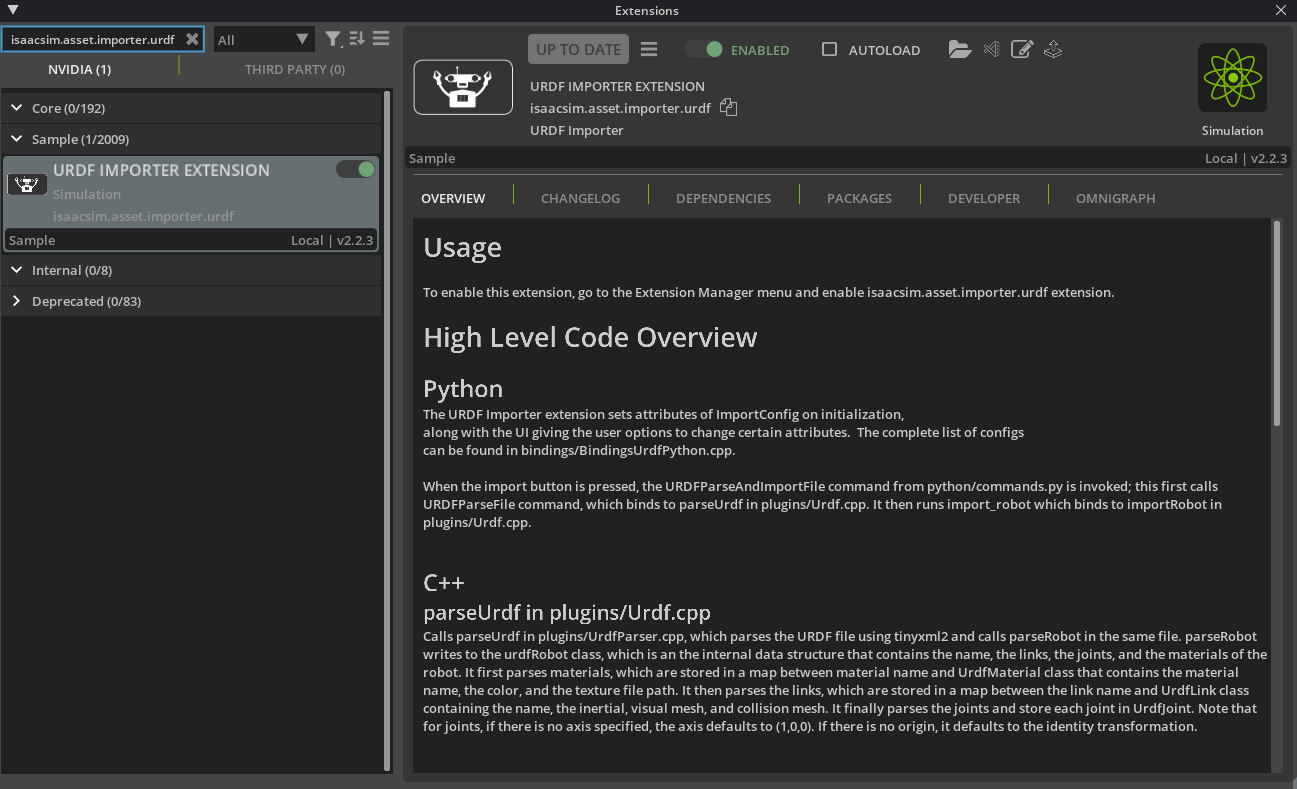
-
File > Import から URDF ファイルを選択します。
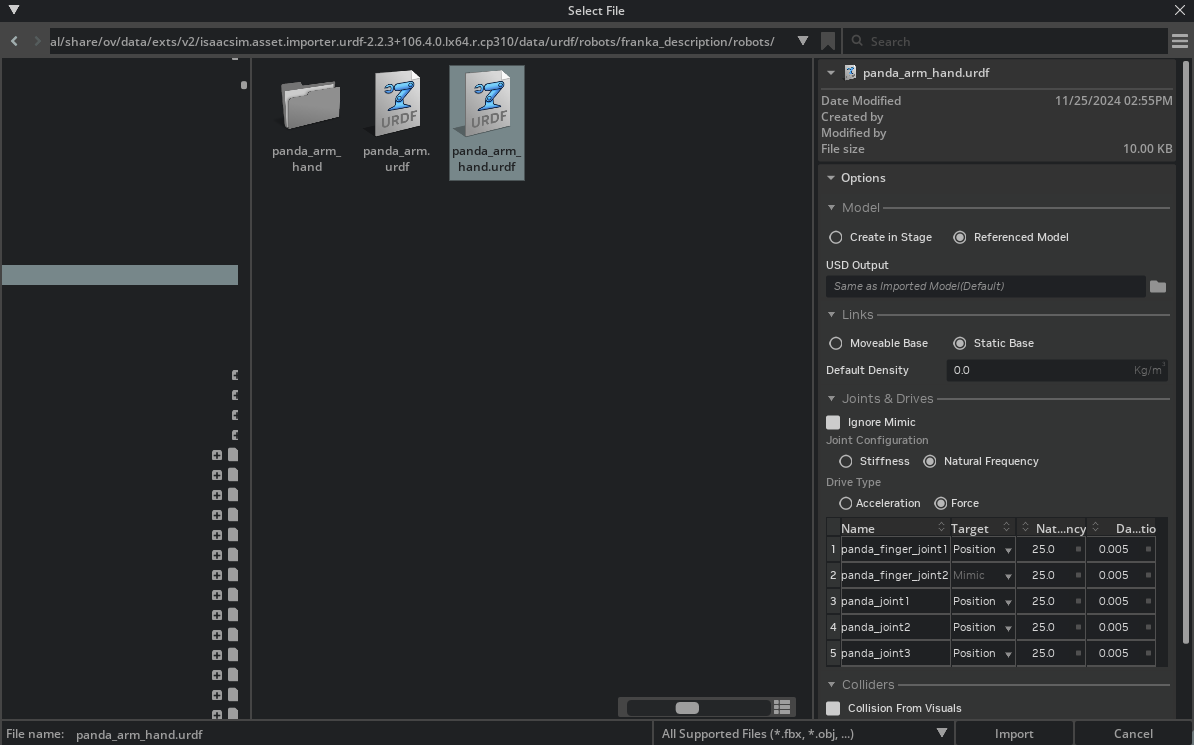
-
インポート設定(出力先、ベースタイプ、密度、コリジョンプロパティ)を構成し、Import をクリックします。
主な設定項目¶
| 設定 | 説明 |
|---|---|
| Static Base / Moveable Base | ロボットのベース固定/移動の設定 |
| Natural Frequency | ジョイント安定性のための固有振動数 |
| Self-Collision | 自己衝突の許可設定 |
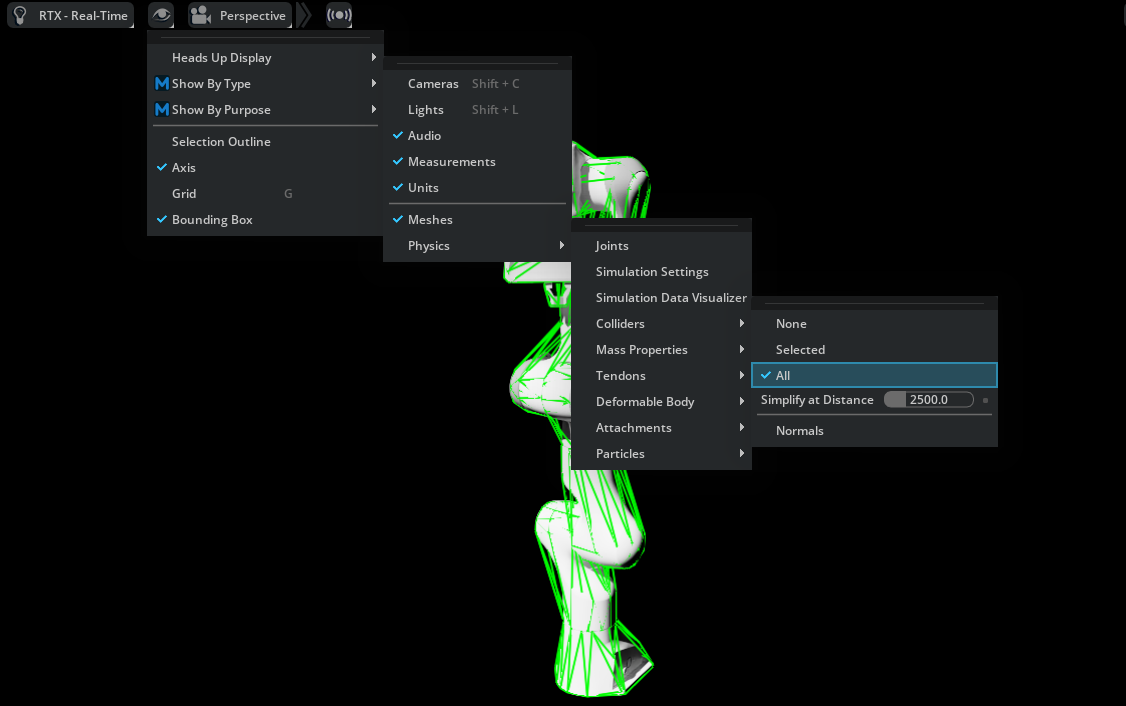
コリジョンメッシュの確認¶
ビューポートの目のアイコン → Show by type > Physics > Colliders > All でコリジョンメッシュを可視化できます。
UI 統合例¶
Robotics Examples タブには、事前設定された例が用意されています:
- Nova Carter URDF
- Franka URDF
- Kaya URDF
- UR10 URDF

Python スクリプトによるインポート¶
_urdf.acquire_urdf_interface() と ImportConfig() を使用してプログラム的にインポートできます。
モバイルロボットの設定¶
- Moveable Base を使用
- ホイールには velocity drive、ステアリングには position drive を設定
- Joint Drive Strength でダンピングを調整
トルク制御ロボット(四足歩行ロボット)¶
- Moveable Base を有効化
- ジョイントドライブタイプを "None" に設定
- スティフネス/ダンピングパラメータを構成
ROS 2 ノードからのインポート¶
Linux 環境では、ROS 2 ノードから直接 URDF をインポートできます:
- ターミナル 1:Transform Publisher を起動
- ターミナル 2:ノード名を確認
- Isaac Sim → File > Import from ROS 2 URDF Node
まとめ¶
このチュートリアルでは以下のトピックを扱いました:
- GUI による URDF ファイルの直接インポート
- インポート設定の構成(ベースタイプ、コリジョン、ドライブ)
- コリジョンメッシュの可視化
- Python スクリプトによるプログラム的インポート
- ROS 2 ノードからのインポート
次のステップ¶
- チュートリアル 2: URDF エクスポート - USD から URDF への変換方法を学びます。