Tuning Joint Drive Gains¶
Learning Objectives¶
After completing this tutorial, you will have learned:
- How to use the Gain Tuner extension
- How to tune position drive gains
- How to tune velocity drive gains
- How to configure velocity limits for industrial robots
- How to save gains to the asset
- How to visualize results
Getting Started¶
Prerequisites¶
- Complete Tutorial 7: Configure a Manipulator before starting this tutorial.
Estimated Time¶
Approximately 15-20 minutes.
Overview¶
In this tutorial, you will learn how to use the Gain Tuner extension to optimize joint drive parameters on robots. You will master techniques for balancing stability and responsiveness through systematic tuning of position and velocity-driven joints.
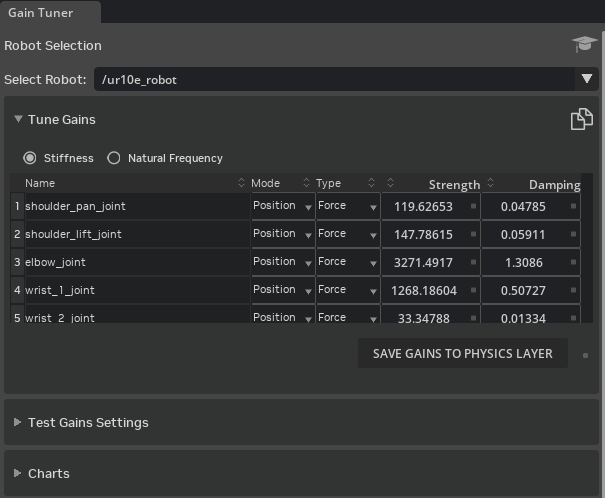
Gain Tuning¶
Position Drive¶
Tune gains for position (pose) control.
Velocity Limit and Industrial Robots¶
Learn how to configure velocity limits for industrial robots.
Velocity Drive¶
Tune gains for velocity control.
Saving Gains to the Asset¶
Save the tuned gains to the robot asset.
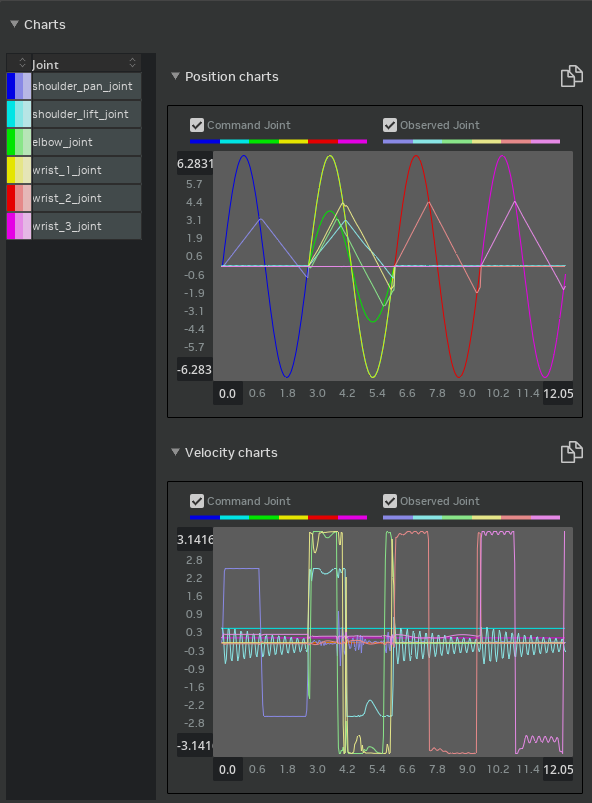
Visualizing Results¶
Visualize tuning results with plots.
Summary¶
This tutorial covered the following topics:
- Using the Gain Tuner extension
- Tuning position drive gains
- Tuning velocity drive gains
- Saving and visualizing gains
Next Steps¶
Proceed to the next tutorial, "Asset Optimization", to learn performance optimization techniques for robot assets.