Rig Closed-Loop Structures¶
Learning Objectives¶
After completing this tutorial, you will have learned:
- How to import a gripper from Onshape
- How to configure closed-loop articulation structures
- How to break articulation loops
- How to add joint drives and mimic joints
- How to configure self-collision
- How to control a gripper with OmniGraph
Getting Started¶
Prerequisites¶
- Complete Tutorial 5: Rig a Mobile Robot before starting this tutorial.
Estimated Time¶
Approximately 20-30 minutes.
Overview¶
In this tutorial, you will import a Robotiq gripper from Onshape, configure its closed-loop articulation structure, add joint drives with mimic joints, and control the gripper using OmniGraph.
Rigging the Robot¶
Adjust joints after importing from Onshape.

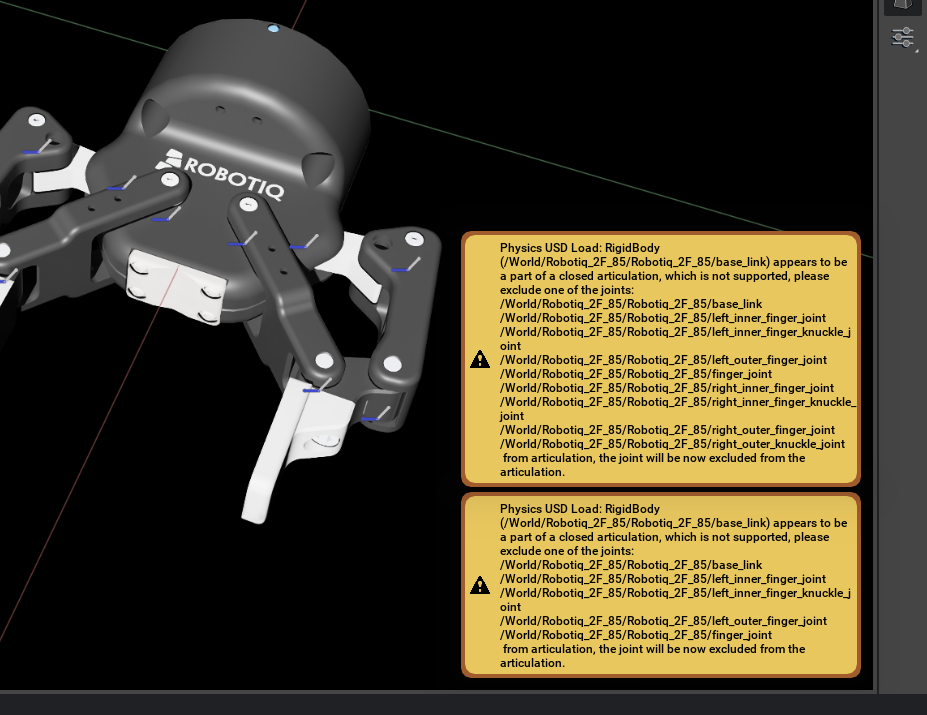
Breaking the Articulation Loop¶
Convert the closed-loop structure into a form the simulator can process.

Adding Joint Drives¶
Configure joint drives for actuation.
Adding Mimic Joints¶
Set up dependent joints as mimic joints.
Collision Meshes and Self-Collision¶
Configure collision meshes and enable self-collision.
Controlling the Gripper with OmniGraph¶
Use OmniGraph to control gripper open/close operations.
Summary¶
This tutorial covered the following topics:
- Importing and configuring closed-loop structures
- Breaking articulation loops
- Adding joint drives and mimic joints
- Configuring self-collision
- Controlling the gripper with OmniGraph
Next Steps¶
Proceed to the next tutorial, "Tuning Joint Drive Gains", to learn how to optimize joint drive parameters.