脚ロボットのリギング¶
学習目標¶
このチュートリアルを修了すると、以下の内容を習得できます:
- ロコモーションポリシーに合わせた初期ロボット姿勢の設定
- Joint State API とドライブ API の設定
- ジョイント設定(スティフネス、ダンピング、力制限、アーマチュア)の設定
- 設定の検証スクリプトによる確認
はじめに¶
前提条件¶
- チュートリアル 3: 基本ロボットのアーティキュレーション を完了していること
所要時間¶
約 20〜30 分
概要¶
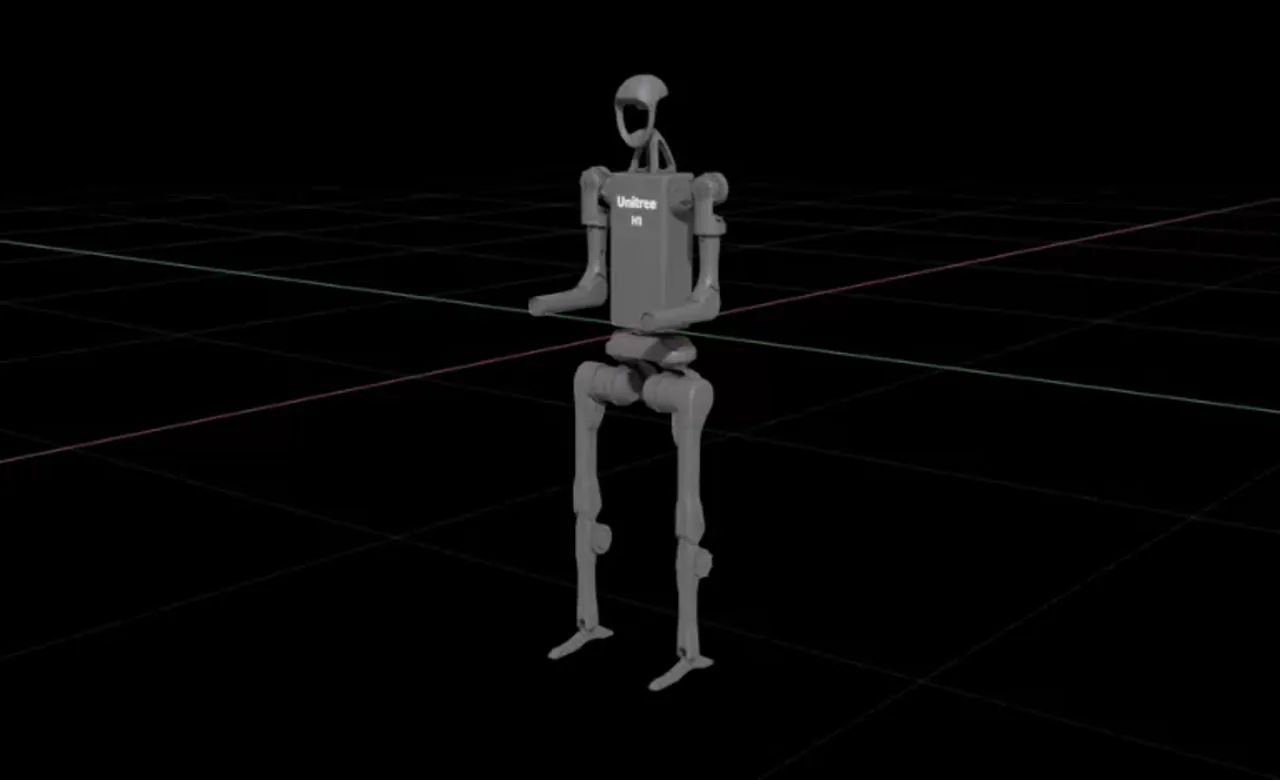
このチュートリアルでは、H1 ヒューマノイドロボットを例に、ロコモーションポリシーの設定仕様に合わせて脚ロボットをリギングする方法を学びます。初期姿勢の設定、ジョイント設定の構成、設定の検証を行います。
初期ロボット姿勢の設定¶
-
H1 USD ファイルを開きます。
-
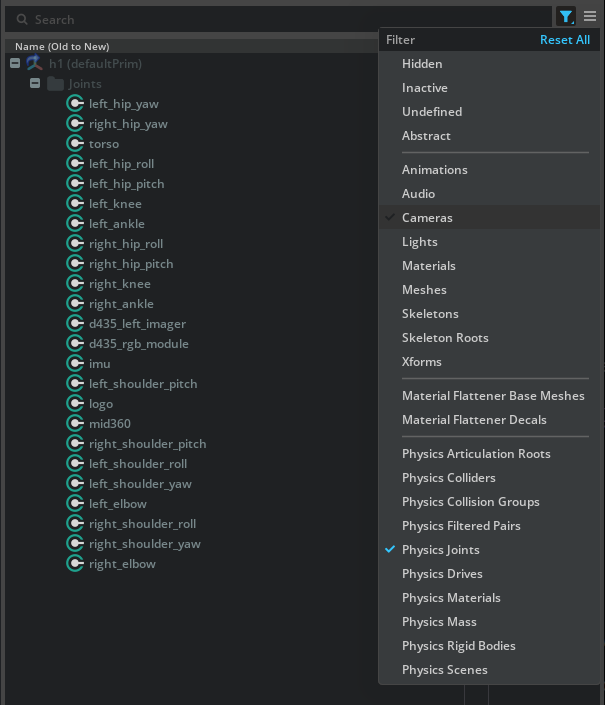
Joint State API を作成します。
-
ジョイントを選択・フィルタリングします。
-
Physics Joint State Angular と Angular Drive API を追加します。
-
ターゲット位置と速度の属性を設定します。
-
ラジアンから度への変換を行います。
-
Fixed Joint で無限落下を防止します。
ジョイント設定の構成¶
-
環境定義からアクチュエータプロパティを設定します。
-
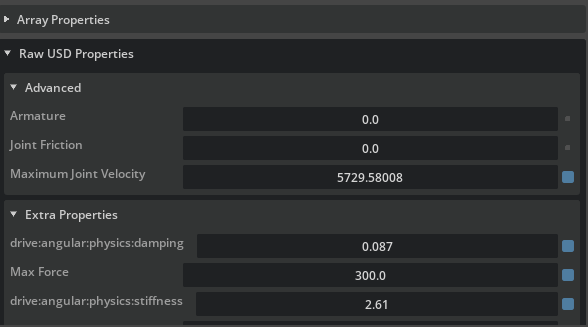
スティフネスとダンピングの値を設定します。
-
力制限(Effort Limit)を設定します。
-
アーマチュアと摩擦を設定します。
-
最大ジョイント速度を設定します。
ジョイント設定の検証¶
-
Script Editor で検証スクリプトを実行します。
-
出力値が仕様と一致することを確認します。
まとめ¶
このチュートリアルでは以下のトピックを扱いました:
- 初期ロボット姿勢の設定
- Joint State API とドライブ API の設定
- ジョイント設定(スティフネス、ダンピング、力制限)の構成
- 検証スクリプトによる設定確認