ジョイントドライブゲインの調整¶
学習目標¶
このチュートリアルを修了すると、以下の内容を習得できます:
- Gain Tuner エクステンションの使い方
- ポジションドライブのゲイン調整
- ベロシティドライブのゲイン調整
- 速度制限と産業用ロボットへの適用
- ゲインのアセットへの保存
- 結果の可視化
はじめに¶
前提条件¶
- チュートリアル 7: マニピュレータの設定 を完了していること
所要時間¶
約 15〜20 分
概要¶
このチュートリアルでは、Gain Tuner エクステンションを使ってロボットのジョイントドライブパラメータを最適化する方法を学びます。安定性と応答性のバランスを取りながら、ポジションドライブとベロシティドライブの調整技法を習得します。
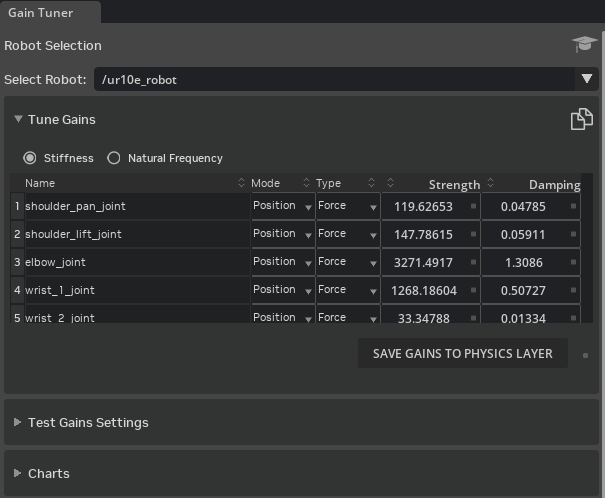
ゲイン調整¶
ポジションドライブ¶
ポジション(位置)制御のゲインを調整します。
速度制限と産業用ロボット¶
産業用ロボットにおける速度制限の設定方法を学びます。
ベロシティドライブ¶
ベロシティ(速度)制御のゲインを調整します。
ゲインのアセットへの保存¶
調整したゲインをロボットアセットに保存します。
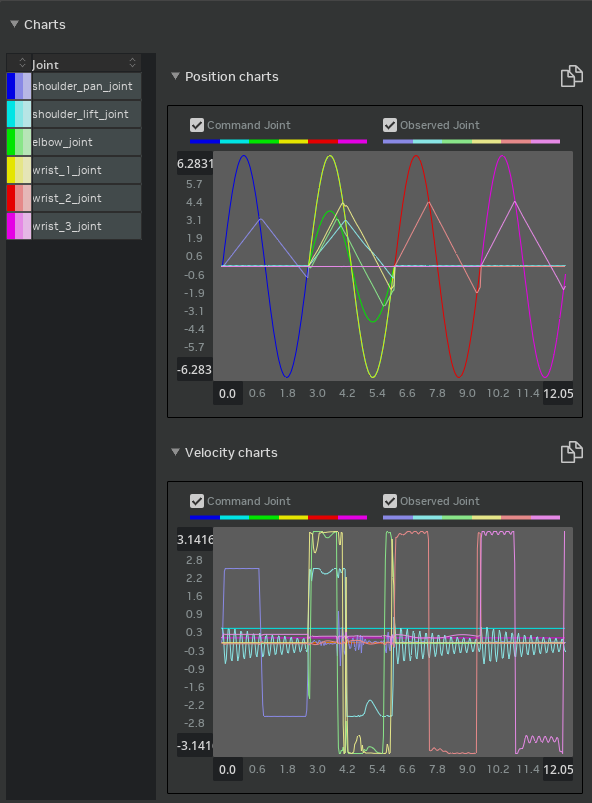
結果の可視化¶
調整結果をプロットで可視化します。
まとめ¶
このチュートリアルでは以下のトピックを扱いました:
- Gain Tuner エクステンションの使い方
- ポジションドライブのゲイン調整
- ベロシティドライブのゲイン調整
- ゲインの保存と可視化
次のステップ¶
次のチュートリアル「アセット最適化」に進み、ロボットアセットのパフォーマンス最適化手法を学びましょう。