閉ループ構造のリギング¶
学習目標¶
このチュートリアルを修了すると、以下の内容を習得できます:
- Onshape からグリッパーをインポートする方法
- 閉ループアーティキュレーション構造の設定
- アーティキュレーションループの分断方法
- ジョイントドライブとミミックジョイントの追加
- セルフコリジョンの設定
- OmniGraph によるグリッパー制御
はじめに¶
前提条件¶
- チュートリアル 5: モバイルロボットのリギング を完了していること
所要時間¶
約 20〜30 分
概要¶
このチュートリアルでは、Robotiq グリッパーを Onshape からインポートし、閉ループのアーティキュレーション構造を設定します。ジョイントドライブとミミックジョイントを追加し、OmniGraph でグリッパーを制御する方法を学びます。
ロボットのリギング¶
Onshape からインポートした後のジョイント調整を行います。

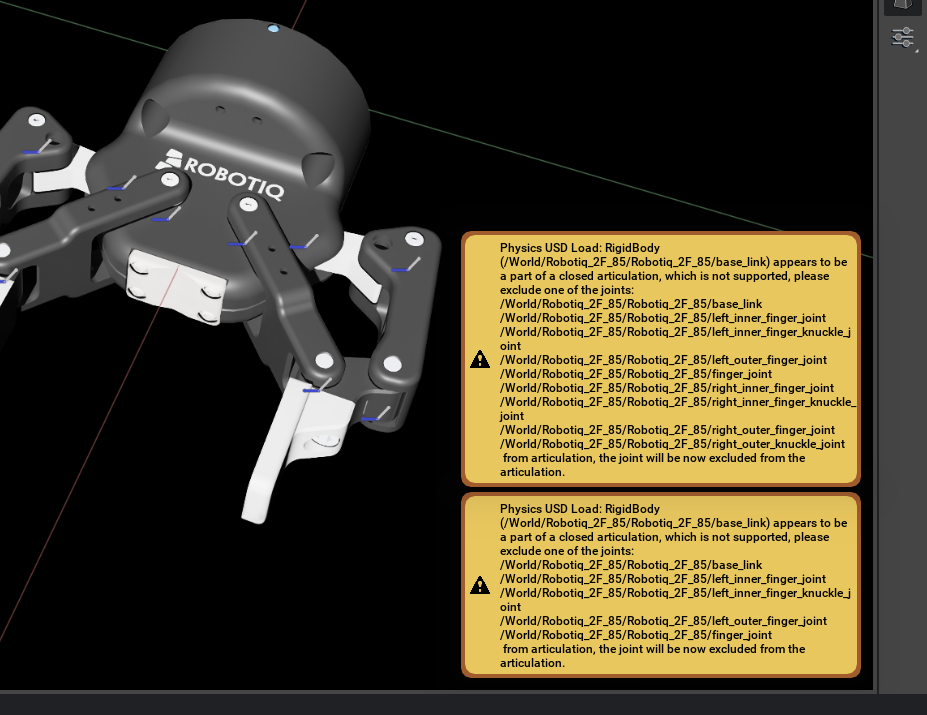
アーティキュレーションループの分断¶
閉ループ構造をシミュレータが処理できる形に変換します。

ジョイントドライブの追加¶
駆動用のジョイントドライブを設定します。
ミミックジョイントの追加¶
従属ジョイントをミミックジョイントとして設定します。
コリジョンメッシュとセルフコリジョン¶
コリジョンメッシュを設定し、セルフコリジョンを有効にします。
OmniGraph によるグリッパー制御¶
OmniGraph を使ってグリッパーの開閉を制御します。
まとめ¶
このチュートリアルでは以下のトピックを扱いました:
- 閉ループ構造のインポートと設定
- アーティキュレーションループの分断
- ジョイントドライブとミミックジョイントの追加
- セルフコリジョンの設定
- OmniGraph によるグリッパー制御
次のステップ¶
次のチュートリアル「ジョイントドライブゲインの調整」に進み、ジョイントドライブパラメータの最適化方法を学びましょう。