マニピュレータの設定¶
学習目標¶
このチュートリアルを修了すると、以下の内容を習得できます:
- アーティキュレーションのソルバー設定の調整方法
- 物理マテリアル(摩擦係数)の作成と適用方法
- ジョイントの力制限(Max Force)の設定方法
- Physics Inspector を使ったアーティキュレーションの検査方法
- Gain Tuner を使ったジョイントゲインの調整方法
はじめに¶
前提条件¶
- チュートリアル 6: マニピュレータのセットアップ を完了していること
所要時間¶
約 30 分
概要¶
前回のチュートリアルでは、UR10e ロボットアームと Robotiq 2F-140 グリッパーをインポートし、単一のアーティキュレーションとして接続しました。しかし、このままではシミュレーションの精度や安定性が十分ではありません。
このチュートリアルでは、マニピュレーションタスク(物体を掴む・運ぶなどの作業)を安定して行えるよう、以下の物理パラメータを調整します:
- ソルバーの反復回数:シミュレーションの精度を向上
- 摩擦係数:グリッパーが物体をしっかり掴めるように設定
- ジョイントの力制限:グリッパーが適切な力で閉じるように設定
- ジョイントゲイン:目標位置への追従性を最適化
使用するアセット¶
チュートリアル 6 で作成したアセットを使用します。まだ完了していない場合は、Isaac Sim に同梱されているサンプルアセットを代わりに使用できます。画面右下の Content タブから以下のパスでアクセスできます:
| アセット | パス | 用途 |
|---|---|---|
| UR10e + グリッパー(接続済み) | Samples > Rigging > Manipulator > import_manipulator > ur10e > ur > ur_gripper.usd |
チュートリアル 6 の完成アセット |
| 設定済み完成版 | Samples > Rigging > Manipulator > configure_manipulator > ur10e > ur > ur_gripper.usd |
このチュートリアルの完成アセット(参考用) |
ステップ 1:アーティキュレーションの調整¶
マニピュレーションタスクでは、多数のジョイントと Mimic ジョイントが連動して動くため、デフォルトのソルバー設定では精度が不足することがあります。このステップでは、ソルバーの反復回数やスリープ条件を調整して、シミュレーションの精度と安定性を向上させます。
1-1. UR10e の Physics Layer を開く¶
チュートリアル 6 で URDF からインポートした場合、UR10e のアセットフォルダ内に _physics サフィックスが付いた Physics Layer ファイル(例:ur10e_physics.usd)が生成されています。このファイルを Isaac Sim で開いてください。
なぜ Physics Layer を直接開く必要があるのか
USD はレイヤー構造を持つファイル形式です。URDF インポート時にロボットのアセットはメインレイヤー(ビジュアルや階層構造)と Physics Layer(物理プロパティやジョイントドライブ)に分けて生成されます。
Isaac Sim の GUI(Property パネル)でパラメータを変更すると、その変更は現在開いているレイヤーに書き込まれます。トップレベルの USD ファイル(ur_gripper.usd など)を開いた状態で物理パラメータを変更すると、変更がトップレベルのレイヤーに書き込まれてしまい、Physics Layer には反映されません。
物理設定を正しい場所に保存するため、変更対象の Physics Layer ファイルを直接開いて作業する必要があります。
1-2. アーティキュレーションの有効化と設定¶
-
Stage パネルで
ur10e/root_jointプリムを選択します。 -
Property パネルの Physics > Articulation Root セクションを確認します。
-
Articulation Enabled チェックボックスがオンになっていることを確認します(デフォルトでオンです)。
-
以下のパラメータを設定します:
パラメータ デフォルト値 設定値 説明 Solver Position Iterations Count 32 64 位置に関するソルバーの反復回数。高い値ほどジョイント拘束の精度が向上 Solver Velocity Iterations Count 1 4 速度に関するソルバーの反復回数。高い値ほど速度制御の精度が向上 Sleep Threshold 0.005 0.00005 この値以下の運動エネルギーでロボットがスリープ状態に入る閾値 Stabilization Threshold 0.001 0.00001 スタビライゼーション(安定化処理)が適用される閾値 
-
Ctrl + S で変更を保存します。
パラメータの補足
- Solver Position/Velocity Iterations Count: 反復回数を増やすとシミュレーションの精度が向上しますが、計算コストも増加します。UR10e + グリッパーのような多自由度ロボットや Mimic ジョイントを持つロボットでは、高い反復回数が必要です。
- Sleep Threshold / Stabilization Threshold: スリープとは、運動が十分に小さくなったときにシミュレーションを一時停止して計算負荷を減らす機能です。マニピュレーションタスクでは微小な動きも重要なため、閾値を下げてスリープに入りにくくします。
ステップ 2:物理マテリアルの追加¶
グリッパーの指先に摩擦を設定しないと、物体を掴んでも滑り落ちてしまいます。このステップでは、物理マテリアル(摩擦係数)を作成してグリッパーの指先に適用します。
2-1. Robotiq 2F-140 の Physics Layer を開く¶
ステップ 1 で開いた UR10e の Physics Layer を閉じ、Robotiq 2F-140 グリッパーの Physics Layer を開きます。グリッパーのアセットフォルダ内の _physics サフィックスが付いたファイル(例:robotiq_2f_140_physics.usd)を開いてください。
Isaac Sim 同梱アセットを使用する場合は Samples > Rigging > Manipulator > import_manipulator > robotiq_2f_140 > configuration > robotiq_2f_140_physics.usd です。
2-2. 物理マテリアルの作成¶
-
Stage パネルで
robotiq_gripper(既存のアセットの場合robotiq_arg2f_140_model) プリムを右クリックします。 -
Create > Physics > Physics Material > Rigid Body Material を選択します。
-
作成された
PhysicsMaterialプリムを、Looks フォルダに移動します:PhysicsMaterialをrobotiq_arg2f_140_model/Looksフォルダにドラッグ&ドロップします。
-
マテリアル名を finger にリネームします(右クリック > Rename)。
2-3. 摩擦係数の設定¶
-
作成した
fingerマテリアルを選択します。 -
Property パネルで以下の摩擦係数を設定します:
パラメータ 設定値 説明 Static Friction 1.0 静止摩擦係数。物体が動き出す前の摩擦力 Dynamic Friction 1.0 動摩擦係数。物体が滑っているときの摩擦力
摩擦係数の値について
摩擦係数 1.0 はゴムのような高摩擦を表します。グリッパーの指先には高い摩擦が必要で、低い値では物体を保持できません。タスクに応じて 0.5〜2.0 の範囲で調整してください。
2-4. グリッパーの指先にマテリアルを適用¶
作成した摩擦マテリアルを、グリッパーの左右の指先コリジョンに適用します。
-
Stage パネルで
colliders/left_inner_finger/mesh_1/boxプリムを選択します。 -
Property パネルの Physics > Physics materials on selected models セクションを見つけます。
-
マテリアルとして、先ほど作成した
/World/robotiq_arg2f_140_model/Looks/fingerを選択します。 -
同様に、
colliders/right_inner_finger/mesh_1/boxにも同じマテリアルを適用します。 -
Ctrl + S で変更を保存します。

ステップ 3:ジョイント力制限の設定¶
グリッパーの finger_joint はグリッパーの開閉を制御するメインジョイントです。このジョイントが発揮できる最大の力(トルク)を設定します。
引き続きステップ 2 で開いた Robotiq 2F-140 の Physics Layer で作業します。
-
Stage パネルで
robotiq_gripper/joints/finger_joint(既存のアセットの場合robotiq_arg2f_140_model/joints/finger_joint) プリムを選択します。 -
Property パネルの Drive > Angular セクションで Max Force を見つけます。
-
Max Force を 200 に設定します。
パラメータ 設定値 説明 Max Force 200 finger_joint が発揮できる最大トルク(N·m) -
Ctrl + S で変更を保存します。

Max Force の値について
Max Force の値は、実際のロボットのトルク仕様に合わせて設定してください。極端に大きい値を設定すると、物体を貫通するなどの不安定な挙動が発生する場合があります。その場合は、物理シミュレーションのステップ頻度を上げる(タイムステップを小さくする)ことで改善できます。
ステップ 4:アーティキュレーションの検査¶
ここまでの設定が正しく適用されているかを、Physics Inspector ツールを使って確認します。
4-1. アセットを開く¶
チュートリアル 6 で作成したトップレベルの UR10e アセット(ur_gripper.usd など)を開きます。このファイルはステップ 1〜3 で変更した Physics Layer を参照しているため、変更が自動的に反映されています。
Isaac Sim 同梱のアセットを使用する場合は、Samples > Rigging > Manipulator > configure_manipulator > ur10e > ur > ur_gripper.usd を開いてください。
4-2. Physics Inspector の起動¶
-
Isaac Sim のメニューから Tools > Physics > Physics Inspector を選択します。
-
Physics Inspector ウィンドウが表示されます。

4-3. アーティキュレーションの確認¶
-
Stage パネルで UR10e のアーティキュレーション(
ur10eプリム)を選択します。 -
Physics Inspector ウィンドウ内の円形のリフレッシュアイコン
 をクリックして、アーティキュレーション情報を読み込みます。
をクリックして、アーティキュレーション情報を読み込みます。 -
各ジョイントの青いスライダーをドラッグして、ターゲット位置を変更します。DOF(自由度)の位置がターゲットに追従して変化することを確認します。
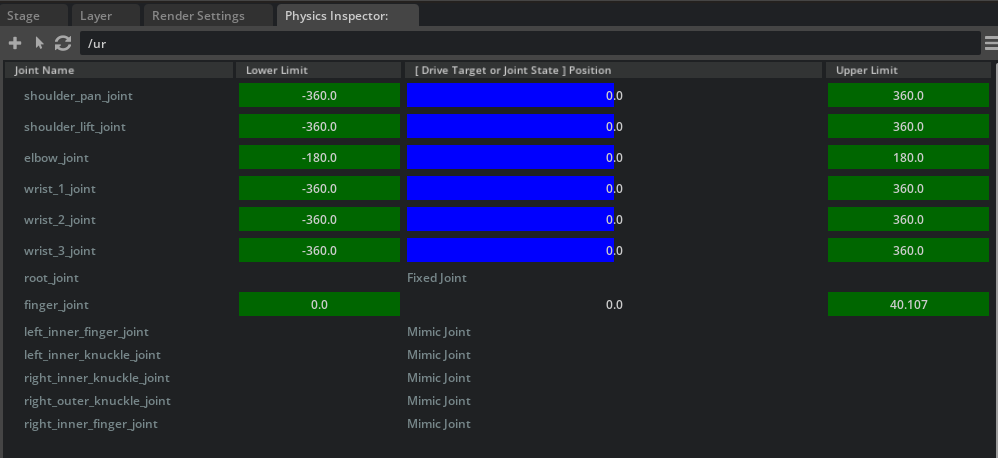
-
確認が完了したら、Physics Inspector ウィンドウを閉じます。
Physics Inspector の注意点
Physics Inspector は omni.physx を部分的に初期化します。そのため、Physics Inspector を使用した後にシミュレーションを実行すると、通常と異なる挙動が発生する可能性があります。Physics Inspector を閉じた後は、ステージを再読み込みしてからシミュレーションを行うことをおすすめします。
ステップ 5:Gain Tuner によるゲイン調整¶
最後に、各ジョイントのゲイン(制御パラメータ)を調整します。ゲインはジョイントが目標位置にどれだけ速く・正確に到達するかを決定する重要なパラメータです。
ゲインとは
ゲインとは、ジョイントのPD 制御(比例-微分制御)のパラメータです。
- Stiffness(剛性 / P ゲイン): ジョイントが目標位置からずれたときに、どれだけ強い力で目標位置に戻そうとするかを決定します。
- Damping(減衰 / D ゲイン): ジョイントの振動を抑制する力の強さを決定します。
これらの値が適切でないと、ロボットが目標位置に到達できなかったり、振動したりします。
5-1. Gain Tuner の起動¶
-
Isaac Sim のメニューから Tools > Robotics > Asset Editors > Gain Tuner を選択します。
-
Gain Tuner ウィンドウが表示されます。
5-2. ロボットの選択¶
-
Robot Selection ドロップダウンから ur10e アーティキュレーションを選択します。
-
ロボットの全ジョイントが一覧で表示されます。
5-3. ゲインの調整¶
Tune Gains パネルで、ジョイントゲインを調整します。Stiffness(デフォルト)からNatural Frequencyに切り替えることで、Gain Tuner では Natural Frequency(固有振動数) と Damping Ratio(減衰比) を使ってゲインを設定できます。
以下のクリティカルダンピング設定が推奨値です:
| パラメータ | 推奨値 | 説明 |
|---|---|---|
| Nat. Freq. | 100.0 | 固有振動数。応答の速さを制御 |
| Damping Ratio | 1.0 | 減衰比。1.0 でクリティカルダンピング(振動なしで最速応答) |
クリティカルダンピングとは
Damping Ratio = 1.0 の状態をクリティカルダンピング(臨界減衰)と呼びます。これは振動せずに最も速く目標位置に到達する状態です。Damping Ratio が 1.0 未満だと振動(オーバーシュート)が発生し、1.0 を超えると応答が遅くなります。

5-4. ゲインのテスト¶
Test Gains Settings パネルで、設定したゲインの動作をテストできます。Playボタンでシミュレーションを実行している状態で、RUN TESTボタンを押すことで各軸の動作をテストできます。

5-5. ゲイン調整のコツ¶
ゲインの調整がうまくいかない場合は、以下のガイドラインを参考にしてください:
| 症状 | 対処法 |
|---|---|
| 目標位置に到達しない(アンダーシュート) | Nat. Freq. を少し増やす |
| 目標位置を超えて振動する(オーバーシュート) | Nat. Freq. を減らすか、Damping Ratio を増やす |
| 動きが遅すぎる | Nat. Freq. を増やす |
| ゲインの効果が分かりにくい | 重力を無効にしてテストすると、ゲインの効果を確認しやすくなります |
効果的なテスト方法
- 一緒に動くことが想定されるジョイントグループ(例:グリッパーの全ジョイント)をまとめてテストしましょう。
- ゆっくり動くジョイントには、最大速度(Maximum Speed)を調整してください。
- Sequence ドロップダウンでテストするジョイントの順序をカスタマイズできます。
まとめ¶
このチュートリアルでは以下のトピックを扱いました:
- アーティキュレーションのソルバー設定:反復回数やスリープ閾値を調整して、多自由度ロボットのシミュレーション精度を向上
- 物理マテリアル(摩擦係数)の設定:グリッパーの指先に高摩擦マテリアルを適用して、物体の把持を安定化
- ジョイント力制限の設定:finger_joint の Max Force を設定して、適切なグリッピング力を確保
- Physics Inspector によるアーティキュレーション検査:ジョイントのターゲット追従をビジュアルに確認
- Gain Tuner によるジョイントゲイン調整:Natural Frequency と Damping Ratio を使った PD ゲインの最適化
参考アセット
設定済みの完成アセットは、Content ブラウザの Samples > Rigging > Manipulator > configure_manipulator > ur10e > ur > ur_gripper.usd で確認できます。
次のステップ¶
次のチュートリアル「ロボット設定ファイルの生成」に進み、キネマティクスソルバー用の設定ファイルを生成する方法を学びましょう。