シンプルなロボットの組み立て¶
学習目標¶
このチュートリアルを修了すると、以下の内容を習得できます:
- ステージへの基本形状の追加と操作
- オブジェクトへの物理プロパティの有効化
- コリジョンプロパティの確認
- 摩擦などの物理プロパティの編集
- 色や反射率などのマテリアルプロパティの編集
はじめに¶
前提条件¶
- チュートリアル 1: ステージのセットアップ を完了していること
所要時間¶
約 15〜20 分
概要¶
このチュートリアルでは、GUI 操作でプリミティブ形状(キューブ、シリンダー)を使い、シンプルな二輪ロボットの基本構造を組み立てます。ロボットのボディと2つの車輪を作成し、物理プロパティの設定、コリジョンメッシュの確認、マテリアルの適用を学びます。
準備¶
- メニューバーのFile > New から新しいStageを作成してください。
- メニューバーのCreate > Physics > Ground Planeでグラウンドプレーンを生成してください。
シーンへのオブジェクト追加¶
ロボットボディの作成¶
- ステージ上で右クリックし、Create > Xform を選択します。
- 作成された Xform を右クリックして Rename を選び、body にリネームします。
- Property パネルの Transform > Translate で位置を (0, 0, 1) に設定します。
- メニューバーの Create > Shape > Cube をクリックしてキューブを作成します。
- Property パネルの Transform > Translate で位置を (0, 0, 1) に設定します。
- Property パネルの Transform > Scale で (2, 1, 0.5) に設定します。
- キューブを body Xform の中にドラッグ&ドロップして子要素にします。

車輪の作成¶
- ステージ上で右クリックし、Create > Xform を選択します。Property パネルで Translate を (0, 1.5, 1)、Orient を (90, 0, 0) に設定します。
- wheel_left にリネームします。
- ステージ上のwheel_leftを右クリックして、 Create > Shape > Cylinder をクリックしてシリンダーを作成します。
- Property パネルの Geometry セクションまでスクロールします。
- Radius を 0.5、Height を 1.0 に変更します。
- シリンダーを wheel_left にリネームします。
- wheel_left Xform を右クリックして Duplicate を選択します。
- 複製された車輪の Translate の y 値を -1.5 に移動します。
- 複製された Xform を wheel_right にリネームします。
-
複製されたシリンダーも wheel_right にリネームします。

物理プロパティの追加¶
Rigid Body の適用¶
- キューブと2つのシリンダーを Ctrl+Shift キーまたは Shift キーを使って全て選択します。
- Property タブの + Add ボタンをクリックします。
- Physics > Rigid Body with Colliders Preset を選択します。
- Play ボタンを押して、オブジェクトが地面に落下することを確認します。
Rigid Body with Colliders Preset について
「Rigid Body with Colliders Preset」を選択すると、Rigid Body API(重力やシミュレーション上の動き)と Collision API(衝突判定)の両方が自動的に適用されます。

コリジョンメッシュの確認¶
- ビューポート上部の
 をクリックします。
をクリックします。 - Show By Type > Physics > Colliders > All を選択します。
-
Collision API が適用された静的オブジェクト(今回はグラウンドプレーン)の周りに紫色のアウトラインが表示されます。動的オブジェクト(今回はキューブと2つのシリンダー)には緑色のアウトラインが表示されます。

摩擦・反発パラメータの追加¶
- メニューバーの Create > Physics > Physics Material をクリックします。
- ポップアップで Rigid Body Material を選択します。
- Property タブで摩擦係数(friction coefficients)や反発係数(restitution)などのパラメータを調整します。
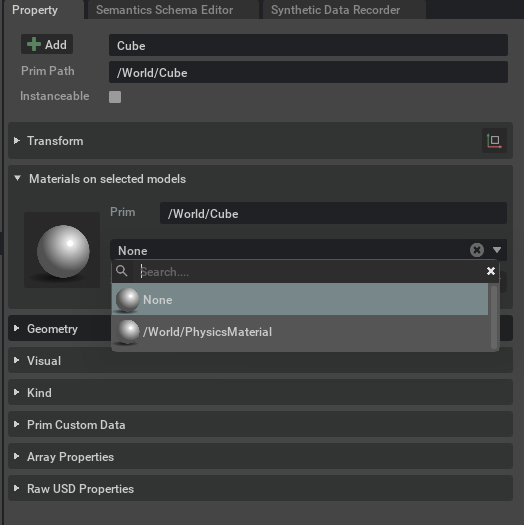
- ステージツリーで先程生成したCubeやCylinderを選択します。
- Property > Physics タブ内の Physics materials on selected models を見つけます。
-
ドロップダウンメニューから作成したマテリアルを選択して割り当てます。
外観マテリアルの設定¶
ビジュアルマテリアルの作成と割り当て¶
- メニューバーの Create > Materials > OmniPBR をクリックする動作を3セット行って、3つのマテリアルを作成します。
- 作成されたマテリアルを右クリックして、それぞれ ground と body 、 wheel にリネームします。
- 作成したbodyマテリアルを選択して、Property タブのMaterial and Shader / Albedo のセクションで Albedo Color をRGB: (0.1, 1.0, 0.1)変更します。
- 反射率(reflectivity)、粗さ(roughness)などのプロパティも必要に応じて調整します。
- 作成したwheelマテリアルを選択して、Property タブのMaterial and Shader / Albedo のセクションで Albedo Color をRGB: (0.1, 0.1, 1.0)変更します。
- 反射率(reflectivity)、粗さ(roughness)などのプロパティも必要に応じて調整します。
- GroundPlane Xfromを選択し、Property タブの Materials on selected models からgroundマテリアルを割り当てます。
- body Xfromを選択し、Property タブの Materials on selected models からbodyマテリアルを割り当てます。
- wheel_left Xfromを選択し、Property タブの Materials on selected models からwheelマテリアルを割り当てます。
- wheel_right Xfromを選択し、Property タブの Materials on selected models からwheelマテリアルを割り当てます。
-
対応するロボットパーツに色の変更が反映されることを確認します。

まとめ¶
このチュートリアルでは以下のトピックを扱いました:
- プリミティブ形状(Cube、Cylinder)を使ったロボット構造の構築
- Rigid Body with Colliders Preset による物理プロパティの設定
- コリジョンメッシュの可視化と確認
- Physics Material による摩擦・反発係数の設定
- OmniPBR マテリアルによる外観の設定
参考アセット
完成したロボットは、画面右下のContentタブのSamples > Rigging > MockRobot フォルダ内の mock_robot_no_joints アセットと同様のものになります。
次のステップ¶
次のチュートリアル「基本ロボットのアーティキュレーション」に進み、ジョイントとアーティキュレーションの設定方法を学びましょう。