ロボットセットアップチュートリアル¶
概要¶
この GUI チュートリアルシリーズでは、仮想世界のセットアップからロボットのデジタルツイン構築まで、NVIDIA Isaac Sim の各種機能を使って段階的に学んでいきます。頻繁に使用するプロパティ、設定、ツールの場所を理解し、ツールバー、アイコン、OpenUSD の標準に親しむことができます。
チュートリアルは 初級・中級・上級 の3つのレベルに分かれており、段階的にスキルを習得できる構成になっています。まずは車輪ロボットのセクションから始めて、基本的な概念を学ぶことをお勧めします。
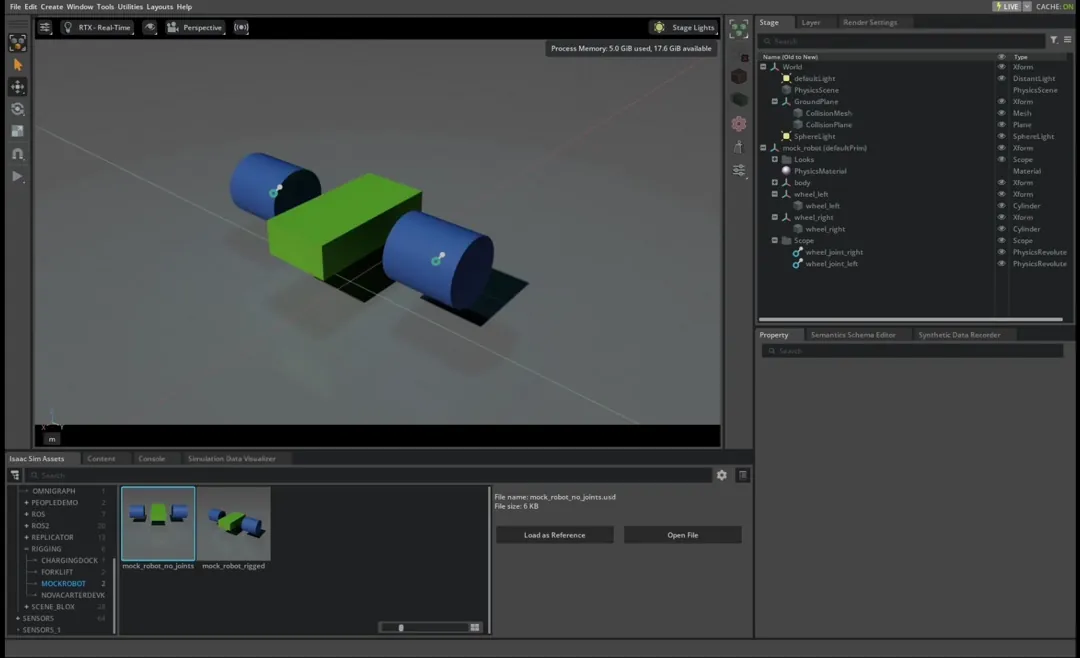
初級:車輪ロボットのセットアップ¶
Beginner
すべてのロボットタイプに共通する基礎的な概念を学びます。ステージのセットアップから始まり、プリミティブ形状でロボットを組み立て、ジョイントとアーティキュレーションで動くロボットに仕上げ、カメラの取り付け、実際のロボットアセットのリギングまでを段階的に進めます。
ステージプロパティの確認、Physics Scene の作成、グラウンドプレーンとライティングの追加方法を学びます。
プリミティブ形状を使ったロボット構造の構築、物理プロパティの設定、マテリアルの適用方法を学びます。
リボリュートジョイントの追加、ジョイントドライブの設定、アーティキュレーションルートの追加、速度コントローラの実装方法を学びます。
カメラセンサーの作成、Camera Inspector による出力確認、ロボットへのカメラ取り付け方法を学びます。
フォークリフト USD アセットを完全にアーティキュレーションされたモバイルロボットに変換する方法を学びます。
中級:マニピュレータのセットアップ¶
Intermediate
基礎知識をベースに、より複雑なロボット構造の扱い方を学びます。URDF からのロボットアームのインポート、グリッパーの接続、物理プロパティの調整、設定ファイルの生成、ピック&プレースタスクの実装までを一通り体験します。
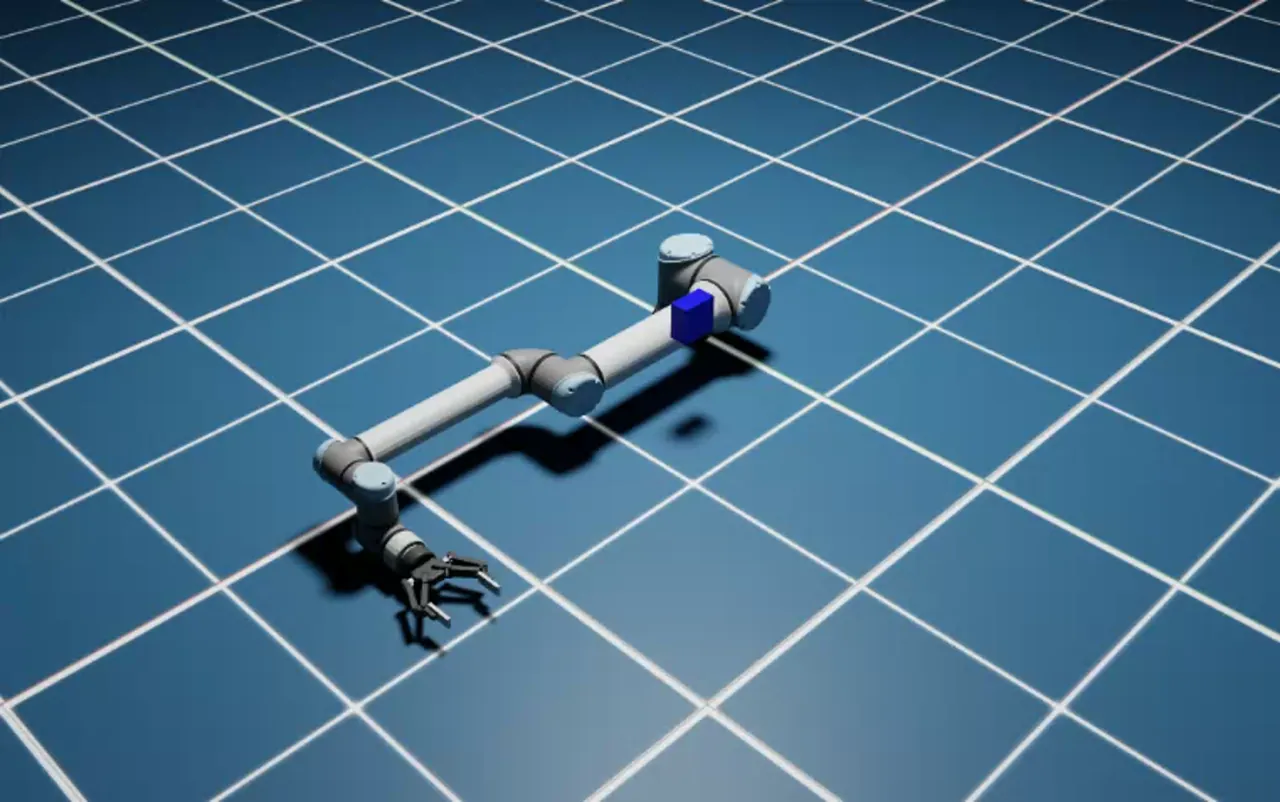
URDF から UR10e ロボットと Robotiq 2F-140 グリッパーをインポートし、単一のアーティキュレーションとして接続する方法を学びます。
アーティキュレーションのソルバー設定、物理マテリアル、ジョイント力制限、ドライブゲインの調整方法を学びます。
Lula Robot Description Editor と USD to URDF Exporter を使って、キネマティクスソルバー用の設定ファイルを生成する方法を学びます。
Lula キネマティクスソルバーによるターゲット追従と RMPFlow によるモーション制御を組み合わせたピック&プレースタスクを実装します。
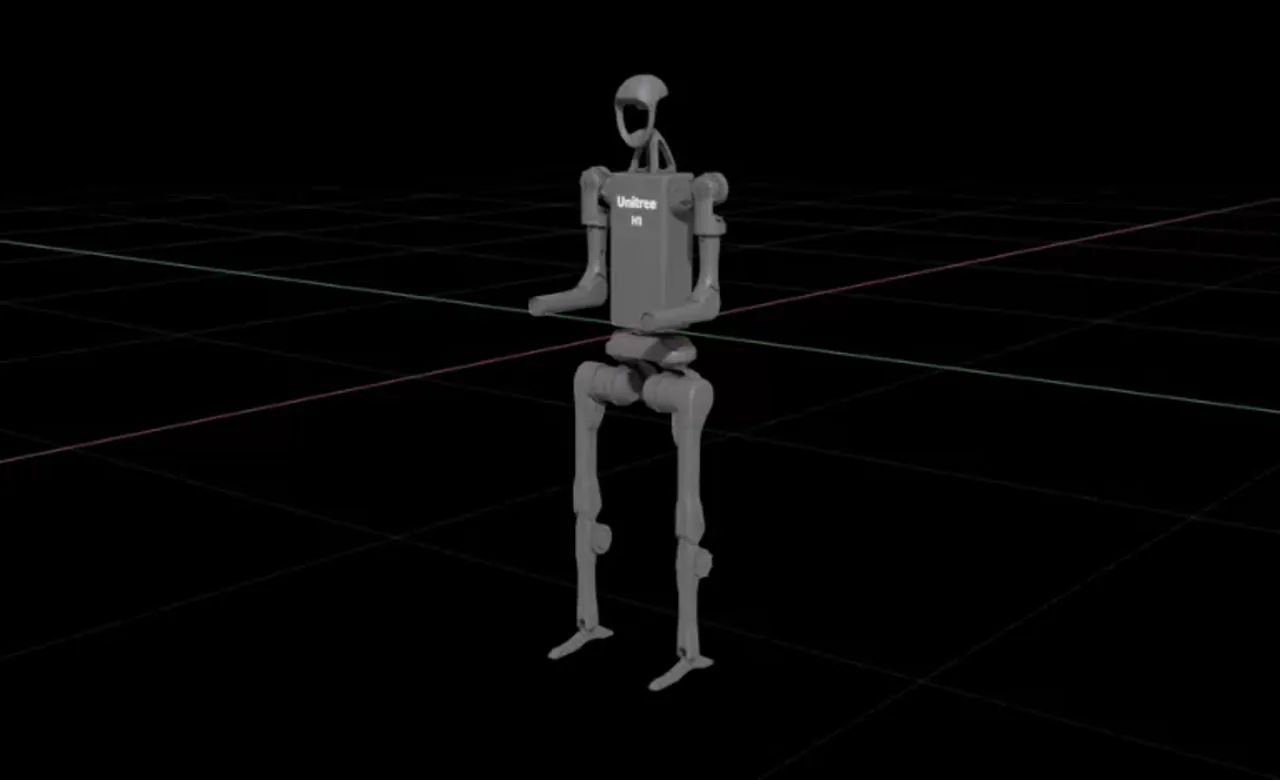
上級:アセットの調整と最適化¶
Advanced
複雑なロボット設定のための高度な技法を習得します。閉ループ機構のリギング、ジョイントドライブゲインの体系的な調整、アセットのパフォーマンス最適化、ロコモーションポリシーに合わせた脚ロボットのリギングを学びます。
Robotiq グリッパーの閉ループアーティキュレーション構造の設定、ミミックジョイント、OmniGraph による制御方法を学びます。
Gain Tuner エクステンションを使ったポジションドライブ・ベロシティドライブのゲイン最適化手法を学びます。
メッシュ統合やシーングラフインスタンシングによるロボットアセットのパフォーマンス最適化手法を学びます。
ロコモーションポリシーの設定仕様に合わせた H1 ヒューマノイドロボットのリギングと検証方法を学びます。