Multiple Tasks
Learning Objectives
After completing this tutorial, you will have learned:
- How to spatially position task assets using the
offset parameter
- How to avoid name collisions using
find_unique_string_name()
- How to manage offsets with
_task_objects and _move_task_objects_to_their_frame()
- How to instantiate and run multiple instances of the same task in parallel
Getting Started
Prerequisites
Estimated Time
Approximately 15-20 minutes.
Preparing the Source Code
This tutorial continues editing the hello_world.py file from the Hello World sample. If you are continuing from the previous tutorial, you can proceed as-is. If you are resuming on a different day, follow these steps to open the source code:
- Activate Windows > Examples > Robotics Examples to open the Robotics Examples tab.
- Click Robotics Examples > General > Hello World.
- Click the Open Source Code button to open
hello_world.py in Visual Studio Code.
For detailed instructions, refer to the "Opening the Hello World Sample" section in Hello World.
Warning
Pressing STOP then PLAY may not properly reset the world. Use the RESET button to restart the simulation.
Parameterizing Tasks
In the previous tutorial, we used a single RobotsPlaying task. To place multiple instances of the same task, we need to offset the position of each task's assets so they don't overlap.
BaseTask supports an offset parameter that translates all assets within the task by the specified amount. The key features are:
| Feature |
Description |
offset parameter |
Passed to the task constructor, available as self._offset |
find_unique_string_name() |
Generates unique names to avoid name/path collisions |
self._task_objects |
A dictionary to register objects managed by the task |
_move_task_objects_to_their_frame() |
Applies the offset to all registered objects |
| from isaacsim.examples.interactive.base_sample import BaseSample
from isaacsim.robot.manipulators.examples.franka.tasks import PickPlace
from isaacsim.robot.manipulators.examples.franka.controllers import PickPlaceController
from isaacsim.robot.wheeled_robots.robots import WheeledRobot
from isaacsim.core.utils.nucleus import get_assets_root_path
from isaacsim.robot.wheeled_robots.controllers.wheel_base_pose_controller import WheelBasePoseController
from isaacsim.robot.wheeled_robots.controllers.differential_controller import DifferentialController
from isaacsim.core.api.tasks import BaseTask
from isaacsim.core.utils.types import ArticulationAction
from isaacsim.core.utils.string import find_unique_string_name # Generate unique names
from isaacsim.core.utils.prims import is_prim_path_valid # Check prim path existence
from isaacsim.core.api.objects.cuboid import VisualCuboid
import numpy as np
class RobotsPlaying(BaseTask):
def __init__(self, name, offset=None):
super().__init__(name=name, offset=offset)
self._task_event = 0
# Add offset so each task instance has a different goal position
self._jetbot_goal_position = np.array([1.3, 0.3, 0]) + self._offset
self._pick_place_task = PickPlace(
cube_initial_position=np.array([0.1, 0.3, 0.05]),
target_position=np.array([0.7, -0.3, 0.0515 / 2.0]),
offset=offset, # Propagate the same offset to the subtask
)
return
def set_up_scene(self, scene):
super().set_up_scene(scene)
self._pick_place_task.set_up_scene(scene)
# Generate unique names to avoid collisions across multiple instances
jetbot_name = find_unique_string_name(
initial_name="fancy_jetbot", is_unique_fn=lambda x: not self.scene.object_exists(x)
)
jetbot_prim_path = find_unique_string_name(
initial_name="/World/Fancy_Jetbot", is_unique_fn=lambda x: not is_prim_path_valid(x)
)
assets_root_path = get_assets_root_path()
jetbot_asset_path = assets_root_path + "/Isaac/Robots/NVIDIA/Jetbot/jetbot.usd"
self._jetbot = scene.add(
WheeledRobot(
prim_path=jetbot_prim_path,
name=jetbot_name,
wheel_dof_names=["left_wheel_joint", "right_wheel_joint"],
create_robot=True,
usd_path=jetbot_asset_path,
position=np.array([0, 0.3, 0]),
)
)
# ── (A) Register Jetbot in _task_objects (for offset application later) ──
self._task_objects[self._jetbot.name] = self._jetbot
# ── (B) Adjust position of Franka created by the subtask ──
# PickPlace subtask already placed Franka, but shift X+1.0 to separate from Jetbot
pick_place_params = self._pick_place_task.get_params()
self._franka = scene.get_object(pick_place_params["robot_name"]["value"])
current_position, _ = self._franka.get_world_pose()
self._franka.set_world_pose(position=current_position + np.array([1.0, 0, 0]))
self._franka.set_default_state(position=current_position + np.array([1.0, 0, 0]))
# ── (C) Apply offset to all objects registered in _task_objects ──
self._move_task_objects_to_their_frame()
return
def get_observations(self):
current_jetbot_position, current_jetbot_orientation = self._jetbot.get_world_pose()
observations = {
"task_event": self._task_event,
self._jetbot.name: {
"position": current_jetbot_position,
"orientation": current_jetbot_orientation,
"goal_position": self._jetbot_goal_position,
}
}
observations.update(self._pick_place_task.get_observations())
return observations
def get_params(self):
pick_place_params = self._pick_place_task.get_params()
params_representation = pick_place_params
params_representation["jetbot_name"] = {"value": self._jetbot.name, "modifiable": False}
params_representation["franka_name"] = pick_place_params["robot_name"]
return params_representation
def pre_step(self, control_index, simulation_time):
if self._task_event == 0:
current_jetbot_position, _ = self._jetbot.get_world_pose()
if np.mean(np.abs(current_jetbot_position[:2] - self._jetbot_goal_position[:2])) < 0.04:
self._task_event += 1
self._cube_arrive_step_index = control_index
elif self._task_event == 1:
if control_index - self._cube_arrive_step_index == 200:
self._task_event += 1
return
def post_reset(self):
self._franka.gripper.set_joint_positions(self._franka.gripper.joint_opened_positions)
self._task_event = 0
return
class HelloWorld(BaseSample):
def __init__(self) -> None:
super().__init__()
return
def setup_scene(self):
world = self.get_world()
# Place the task with an offset
world.add_task(RobotsPlaying(name="awesome_task", offset=np.array([0, -1.0, 0])))
# Place a visual cube at the origin as a position reference
VisualCuboid(
prim_path="/new_cube_1",
name="visual_cube",
position=np.array([1.0, 0, 0.05]),
scale=np.array([0.1, 0.1, 0.1]),
)
return
async def setup_post_load(self):
self._world = self.get_world()
task_params = self._world.get_task("awesome_task").get_params()
self._franka = self._world.scene.get_object(task_params["franka_name"]["value"])
self._jetbot = self._world.scene.get_object(task_params["jetbot_name"]["value"])
self._cube_name = task_params["cube_name"]["value"]
self._franka_controller = PickPlaceController(
name="pick_place_controller",
gripper=self._franka.gripper,
robot_articulation=self._franka,
)
self._jetbot_controller = WheelBasePoseController(
name="cool_controller",
open_loop_wheel_controller=DifferentialController(
name="simple_control",
wheel_radius=0.03,
wheel_base=0.1125,
),
)
self._world.add_physics_callback("sim_step", callback_fn=self.physics_step)
await self._world.play_async()
return
async def setup_post_reset(self):
self._franka_controller.reset()
self._jetbot_controller.reset()
await self._world.play_async()
return
def physics_step(self, step_size):
current_observations = self._world.get_observations()
if current_observations["task_event"] == 0:
self._jetbot.apply_wheel_actions(
self._jetbot_controller.forward(
start_position=current_observations[self._jetbot.name]["position"],
start_orientation=current_observations[self._jetbot.name]["orientation"],
goal_position=current_observations[self._jetbot.name]["goal_position"],
)
)
elif current_observations["task_event"] == 1:
self._jetbot.apply_wheel_actions(ArticulationAction(joint_velocities=[-8.0, -8.0]))
elif current_observations["task_event"] == 2:
self._jetbot.apply_wheel_actions(ArticulationAction(joint_velocities=[0.0, 0.0]))
actions = self._franka_controller.forward(
picking_position=current_observations[self._cube_name]["position"],
placing_position=current_observations[self._cube_name]["target_position"],
current_joint_positions=current_observations[self._franka.name]["joint_positions"],
)
self._franka.apply_action(actions)
if self._franka_controller.is_done():
self._world.pause()
return
|
Note that set_up_scene deals with two categories of offset application:
| Target |
How Offset is Applied |
Description |
| Subtask objects (Franka, cube) |
Pass offset to PickPlace (done in the constructor) |
The subtask applies the offset internally via its own _task_objects and _move_task_objects_to_their_frame() |
| This task's objects (Jetbot) |
Register in _task_objects → _move_task_objects_to_their_frame() (A, C) |
Objects you add yourself must be registered and offset by yourself |
Step (B) is separate from offset application — it shifts Franka an additional 1.0 along the X axis so it doesn't overlap with Jetbot. This is an extra adjustment on top of the offset already applied by the subtask.
Save the code and verify the simulation:
- Press Ctrl+S to save, then do File > New From Stage Template > Empty and click LOAD.
- Press PLAY to observe the robots operating at a position offset by -1.0 along the Y axis.
- Compare with the white cube near the origin to verify the task assets are offset.
Running Multiple Tasks in Parallel
Now that the task is parameterized with offset, we can instantiate multiple copies and run them in parallel. Here we place 3 RobotsPlaying tasks side by side along the Y axis.
Key points when handling multiple tasks:
- Make task event keys unique — Prefix with the task name (
self.name + "_event") so observations from different tasks don't collide
- Manage controllers in lists — Store controllers corresponding to each task in lists
world_cleanup() — Initialize lists during hot reload
| from isaacsim.examples.interactive.base_sample import BaseSample
from isaacsim.core.utils.nucleus import get_assets_root_path
from isaacsim.robot.manipulators.examples.franka.tasks import PickPlace
from isaacsim.robot.manipulators.examples.franka.controllers import PickPlaceController
from isaacsim.robot.wheeled_robots.robots import WheeledRobot
from isaacsim.robot.wheeled_robots.controllers.wheel_base_pose_controller import WheelBasePoseController
from isaacsim.robot.wheeled_robots.controllers.differential_controller import DifferentialController
from isaacsim.core.api.tasks import BaseTask
from isaacsim.core.utils.types import ArticulationAction
from isaacsim.core.utils.string import find_unique_string_name
from isaacsim.core.utils.prims import is_prim_path_valid
import numpy as np
class RobotsPlaying(BaseTask):
def __init__(self, name, offset=None):
super().__init__(name=name, offset=offset)
self._task_event = 0
self._jetbot_goal_position = np.array([np.random.uniform(1.2, 1.6), 0.3, 0]) + self._offset
self._pick_place_task = PickPlace(
cube_initial_position=np.array([0.1, 0.3, 0.05]),
target_position=np.array([0.7, -0.3, 0.0515 / 2.0]),
offset=offset,
)
return
def set_up_scene(self, scene):
super().set_up_scene(scene)
self._pick_place_task.set_up_scene(scene)
jetbot_name = find_unique_string_name(
initial_name="fancy_jetbot", is_unique_fn=lambda x: not self.scene.object_exists(x)
)
jetbot_prim_path = find_unique_string_name(
initial_name="/World/Fancy_Jetbot", is_unique_fn=lambda x: not is_prim_path_valid(x)
)
assets_root_path = get_assets_root_path()
jetbot_asset_path = assets_root_path + "/Isaac/Robots/NVIDIA/Jetbot/jetbot.usd"
self._jetbot = scene.add(
WheeledRobot(
prim_path=jetbot_prim_path,
name=jetbot_name,
wheel_dof_names=["left_wheel_joint", "right_wheel_joint"],
create_robot=True,
usd_path=jetbot_asset_path,
position=np.array([0, 0.3, 0]),
)
)
# (A) Register Jetbot in _task_objects
self._task_objects[self._jetbot.name] = self._jetbot
# (B) Shift Franka created by subtask X+1.0 to separate from Jetbot
pick_place_params = self._pick_place_task.get_params()
self._franka = scene.get_object(pick_place_params["robot_name"]["value"])
current_position, _ = self._franka.get_world_pose()
self._franka.set_world_pose(position=current_position + np.array([1.0, 0, 0]))
self._franka.set_default_state(position=current_position + np.array([1.0, 0, 0]))
# (C) Apply offset to all objects registered in _task_objects
self._move_task_objects_to_their_frame()
return
def get_observations(self):
current_jetbot_position, current_jetbot_orientation = self._jetbot.get_world_pose()
observations = {
# Use task name as prefix to avoid key collisions across multiple tasks
self.name + "_event": self._task_event,
self._jetbot.name: {
"position": current_jetbot_position,
"orientation": current_jetbot_orientation,
"goal_position": self._jetbot_goal_position,
}
}
observations.update(self._pick_place_task.get_observations())
return observations
def get_params(self):
pick_place_params = self._pick_place_task.get_params()
params_representation = pick_place_params
params_representation["jetbot_name"] = {"value": self._jetbot.name, "modifiable": False}
params_representation["franka_name"] = pick_place_params["robot_name"]
return params_representation
def pre_step(self, control_index, simulation_time):
if self._task_event == 0:
current_jetbot_position, _ = self._jetbot.get_world_pose()
if np.mean(np.abs(current_jetbot_position[:2] - self._jetbot_goal_position[:2])) < 0.04:
self._task_event += 1
self._cube_arrive_step_index = control_index
elif self._task_event == 1:
if control_index - self._cube_arrive_step_index == 200:
self._task_event += 1
return
def post_reset(self):
self._franka.gripper.set_joint_positions(self._franka.gripper.joint_opened_positions)
self._task_event = 0
return
class HelloWorld(BaseSample):
def __init__(self) -> None:
super().__init__()
# Manage controllers and objects for each task in lists
self._tasks = []
self._num_of_tasks = 3
self._franka_controllers = []
self._jetbot_controllers = []
self._jetbots = []
self._frankas = []
self._cube_names = []
return
def setup_scene(self):
world = self.get_world()
# Place 3 tasks offset along the Y axis
for i in range(self._num_of_tasks):
world.add_task(RobotsPlaying(name="my_awesome_task_" + str(i), offset=np.array([0, (i * 2) - 3, 0])))
return
async def setup_post_load(self):
self._world = self.get_world()
for i in range(self._num_of_tasks):
self._tasks.append(self._world.get_task(name="my_awesome_task_" + str(i)))
task_params = self._tasks[i].get_params()
self._frankas.append(self._world.scene.get_object(task_params["franka_name"]["value"]))
self._jetbots.append(self._world.scene.get_object(task_params["jetbot_name"]["value"]))
self._cube_names.append(task_params["cube_name"]["value"])
self._franka_controllers.append(
PickPlaceController(
name="pick_place_controller",
gripper=self._frankas[i].gripper,
robot_articulation=self._frankas[i],
events_dt=[0.008, 0.002, 0.5, 0.1, 0.05, 0.05, 0.0025, 1, 0.008, 0.08],
)
)
self._jetbot_controllers.append(
WheelBasePoseController(
name="cool_controller",
open_loop_wheel_controller=DifferentialController(
name="simple_control",
wheel_radius=0.03,
wheel_base=0.1125,
),
)
)
self._world.add_physics_callback("sim_step", callback_fn=self.physics_step)
await self._world.play_async()
return
async def setup_post_reset(self):
for i in range(len(self._tasks)):
self._franka_controllers[i].reset()
self._jetbot_controllers[i].reset()
await self._world.play_async()
return
def physics_step(self, step_size):
current_observations = self._world.get_observations()
# Process all tasks in a loop
for i in range(len(self._tasks)):
if current_observations[self._tasks[i].name + "_event"] == 0:
self._jetbots[i].apply_wheel_actions(
self._jetbot_controllers[i].forward(
start_position=current_observations[self._jetbots[i].name]["position"],
start_orientation=current_observations[self._jetbots[i].name]["orientation"],
goal_position=current_observations[self._jetbots[i].name]["goal_position"],
)
)
elif current_observations[self._tasks[i].name + "_event"] == 1:
self._jetbots[i].apply_wheel_actions(ArticulationAction(joint_velocities=[-8.0, -8.0]))
elif current_observations[self._tasks[i].name + "_event"] == 2:
self._jetbots[i].apply_wheel_actions(ArticulationAction(joint_velocities=[0.0, 0.0]))
actions = self._franka_controllers[i].forward(
picking_position=current_observations[self._cube_names[i]]["position"],
placing_position=current_observations[self._cube_names[i]]["target_position"],
current_joint_positions=current_observations[self._frankas[i].name]["joint_positions"],
)
self._frankas[i].apply_action(actions)
return
def world_cleanup(self):
# Initialize lists during hot reload
self._tasks = []
self._franka_controllers = []
self._jetbot_controllers = []
self._jetbots = []
self._frankas = []
self._cube_names = []
return
|
Explicitly specifying events_dt
As explained in Tutorial 4, events_dt is a list that controls the execution speed of each state in PickPlaceController. When multiple Frankas operate simultaneously, the default values may cause timing mismatches and unstable behavior, so here we explicitly specify the values to synchronize the motion speed across all robots.
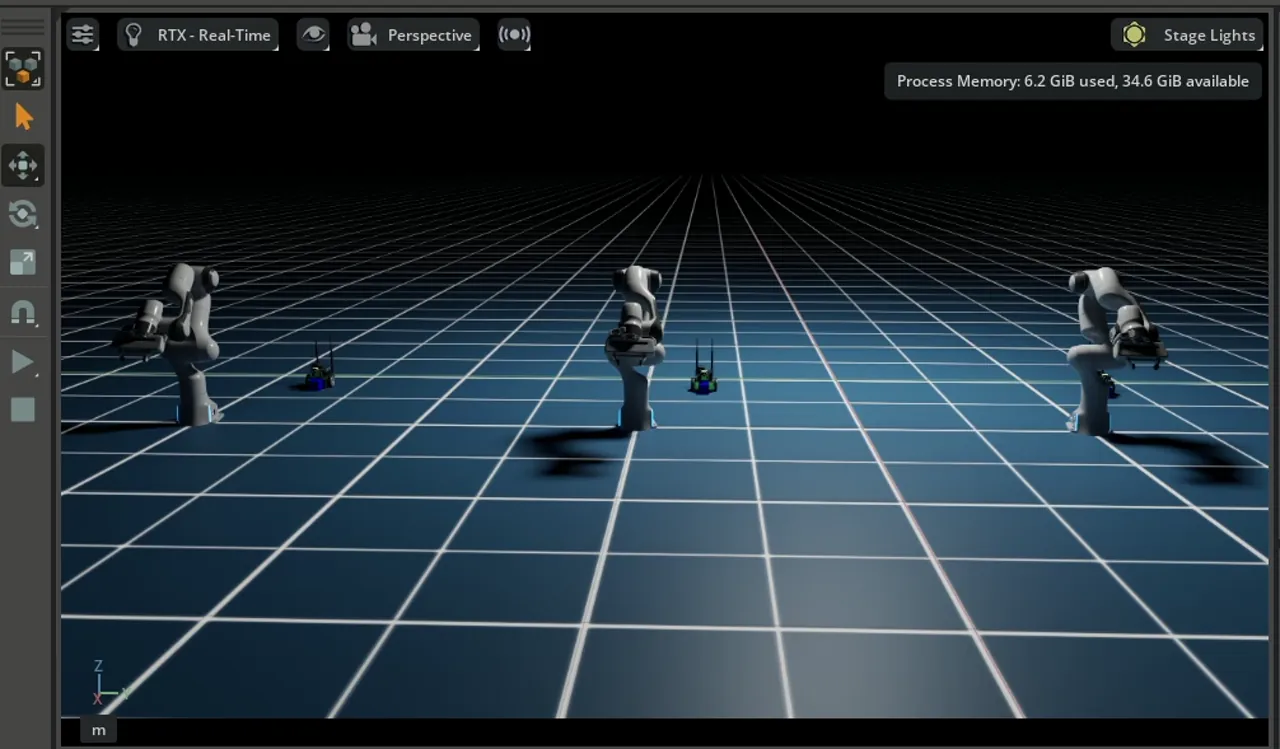
Save the code and verify the simulation:
- Press Ctrl+S to save, then do File > New From Stage Template > Empty and click LOAD.
- Press the PLAY button and observe 3 sets of Jetbot + Franka operating simultaneously side by side.
Summary
This tutorial covered the following topics:
- Spatial positioning of tasks using the
offset parameter
- Name collision avoidance with
find_unique_string_name()
- Offset management with
_task_objects and _move_task_objects_to_their_frame()
- Parallel management of controllers and tasks using lists
- Hot reload support with
world_cleanup()
Further Reading
For an example of combining different types of tasks, refer to the standalone sample included with Isaac Sim: standalone_examples/api/isaacsim.robot.manipulators/universal_robots/multiple_tasks.py.
Next Steps
Proceed to the next tutorial, "Adding Props", to learn how to configure physics attributes on objects via the GUI.
Note
The following tutorials continue to use the Extension Workflow for development. Converting to the Standalone Workflow follows the same approach as learned in Hello World.